OmniCal
OmniCal is a camera-based projector calibration system which gives disguise the ability to 'see'.
Interested in learning more?
Power for projection
A camera-based projector calibration system, OmniCal quickly captures a point cloud of your stage, accurately calibrates projectors to sub-pixel accuracy, and conforms pre-existing surface meshes to match reality.
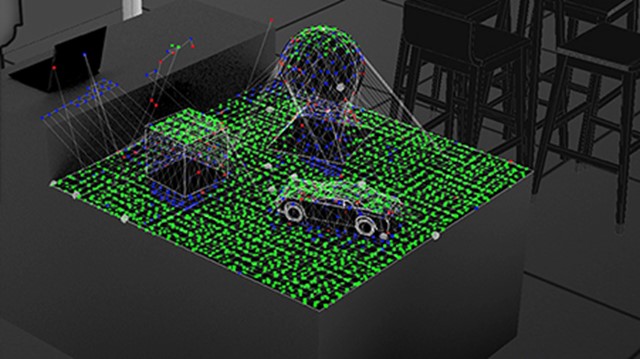
Structured light
OmniCal uses structured light patterns to calibrate the relationship between projection surfaces, projectors and cameras. The captured images are used to construct a 3D representation of projection surfaces as a point cloud.
If projectors have been moved, recalibrate in a single click. The Mesh Deform tool adapts the 3D Model to match the real world, using the point cloud data.
Scalable
OmniCal can dramatically improve projection quality and setup time, even for the most complex setups.
Calibrate 360° projection environments - giving you the scalability you need for a show of any size.

Powerful hardware
Key to the powerful software, is the powerful disguise OmniCal camera hardware. It comes pre-configured and licensed allowing you to use it seamlessly with the disguise software.
OmniCal hardware
OmniCal is a hardware-on-software solution. There are two hardware kits available: wireless kits that use iPod Touch for on-the-move and quick setups, or wired kits that use pre-configured ethernet-based machine-vision cameras. The hardware has been developed and tested alongside the software, ensuring reliability and user confidence.

OmniCal Wired kits
Designed to include everything you need to get your show up and running in any theatre, stadium, or space with a permanent or semi permanent projection experience.
The OmniCal Wired kits come in two sizes, small or large, and include 5MP Machine Vision cameras, including filter and adaptor, and a selection of 6mm, 8mm and 12mm lenses - allowing for on the fly customisation to ensure the perfect setup.
Each camera comes pre-configured with its own license, allowing you to seamlessly use it within the disguise OmniCal software.

OmniCal Custom kits
The OmniCal Custom kits allow you to select exactly what you need for a specific permanent or semi permanent projection experience.
Start with selecting which size case, and then select the number of cameras, and the exact lenses needed for your project.
5MP Machine Vision cameras, including filter and adaptor, and a selection of 6mm, 8mm and 12mm lenses are available - see the spec sheet for more info.
01
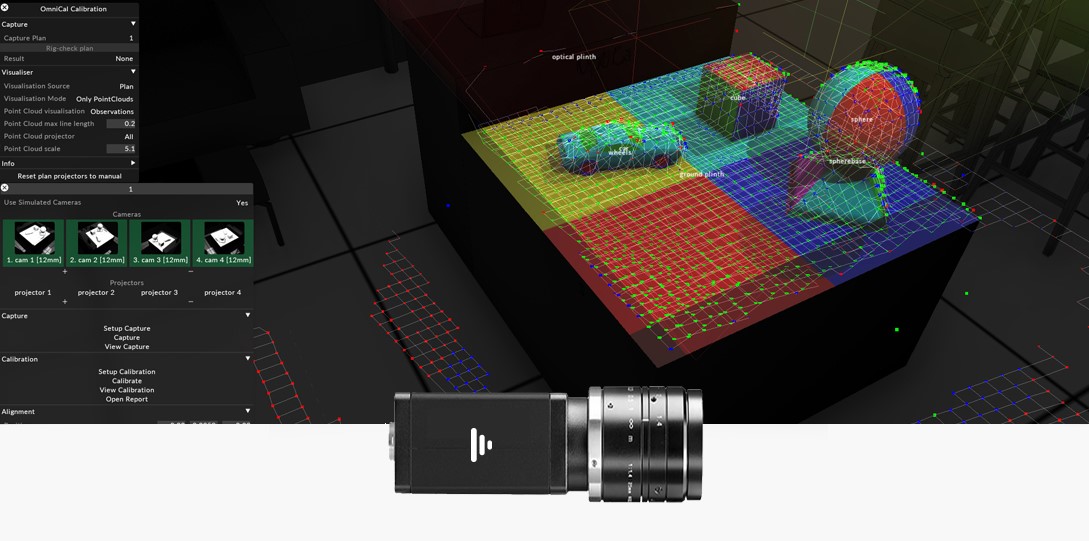
Simulated camera plan
Use the virtual cameras in the stage to plan camera placements and generate test calibrations to ensure optimal camera placement once on site.
To learn more about simulated camera plans see here

02
Camera set-up
Once onsite check the real cameras match your simulated Camera Plan using the RigCheck feature.
The disguise OmniCal editor will also allow you to check and adjust exposure settings, identify cameras with unique names, and configure all other OmniCal camera settings.
To learn more about camera setup see here
03
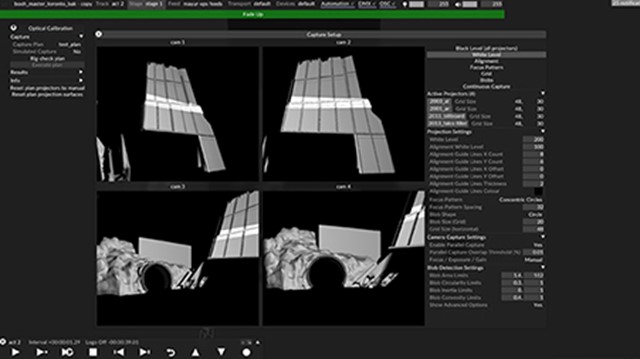
Capture
Capture is an automatic ‘one-button’ process that typically takes less than a minute.
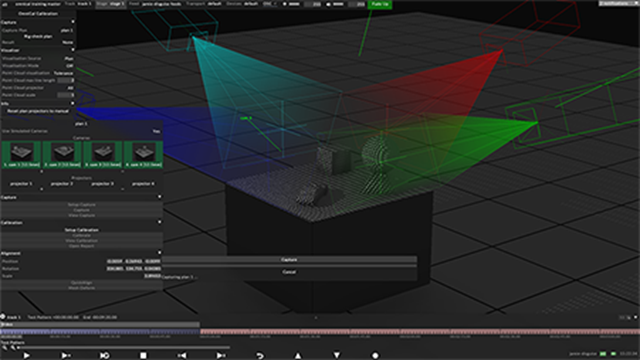
Structured light patterns are projected onto the projection surfaces, while the cameras capture images of these patterns, creating a point cloud.
Once capture is complete, the stage is free and the rest of your OmniCal set up can be done remotely from your Designer laptop.
To learn more about Capture see here
04
Calibration
You now have your captured point cloud, the relative positions of cameras, projectors and their lens intrinsics.
View the point cloud checking for any calibration errors in pixels for each projector and adjust as necessary.
To learn more about Calibration see here
05
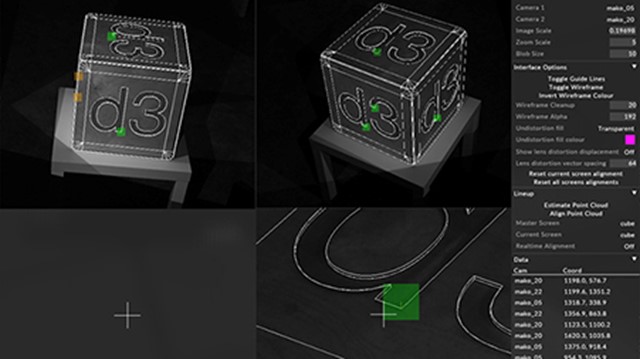
Alignment
Line up wireframe views of the projection surfaces with reality, and add re-shape points to correct the shape of the mesh if necessary.
So long as the cameras or projection surfaces don’t move, you only need to do the alignment once.
To learn more about Alignment see here

06
Mesh deform
This is a final key step which deforms a mesh in Disguise to match the real world by using the depth information from the point cloud.
Watch the full demo
![]()